机械手通常可实现的基本运动包括:伸缩、旋转、摆动、升降夹紧和松开等,下面是几种常见的简单机械手模型:
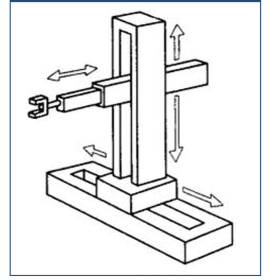
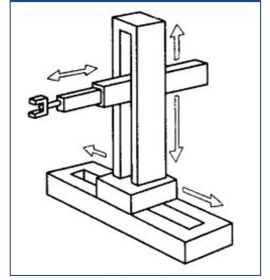
1、 直角坐标机械手,由三个相互正交的平移轴组成。手臂可前后伸缩、上下升降和左右横移三个动作。结构简单,定位精度高。
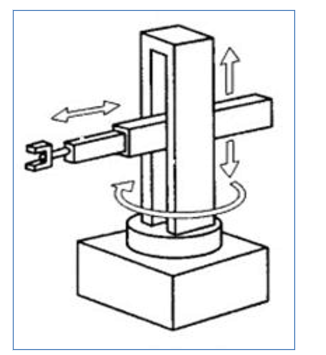
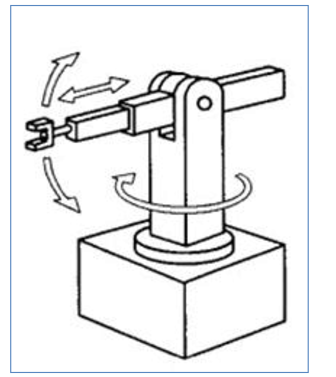
2、 圆柱坐标机械手 如图下图所示,有立柱和一个安装在立柱上的水平臂组成手臂,可前后伸缩、上下升降和绕立柱转动其结构占据空间位置小,活动范围大。
3、 球坐标机械手 如图2-3所示,由回转机座、俯仰铰链和伸缩臂组成手臂可前后伸缩、上下和左右摆动。其结构能以简单的机构得到较大的工作范围。
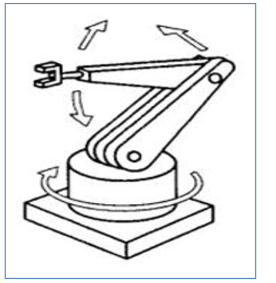
4、 多关节式机械手 如图2-4所示,由大小两手臂和立柱等机构组成,可实现三个方向的旋转运动。具有动作灵活、运动惯性小、动作范围大等优点。