空间机械臂是一类仿人类手臂构型的空间机器人,是融合机械、电子、控制、计算机等科学技术为一体的复杂系统。随着空间技术的发展和空间探索的不断深入,空间机械臂已经成为各国深空探测和在轨值守不可或缺的组件之一,在空间站、卫星、深空探测车上得到了广泛的应用。空间机械臂的特点是能够像人类的手臂一样抓取和搬运物体,在太空中对在轨单元进行操作,完成诸如空间舱段搬运与转移、太阳能帆板辅助展开、舱段辅助对接、小卫星捕获、辅助宇航员出舱等多类任务,替代和协助宇航员完成多种危险及无法单靠人力完成的工作,是空间环境中长期值守的核心装备,也是能够反映一个国家的科技水平的高尖端航天装备。
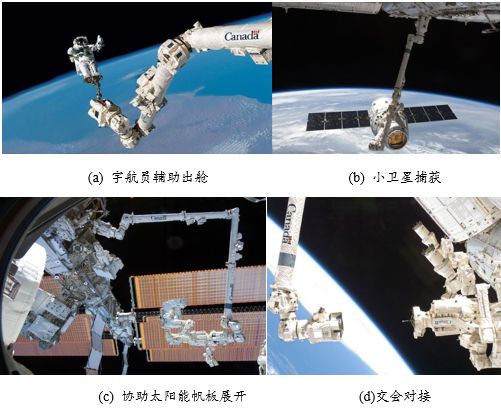
空间机械臂依靠其不同的构型,能够适应种类各异的空间操作任务。以国际空间站的舱外机械臂Canadarm2为例,由于其负载能力大,且能够承受外太空的严苛环境,能够完成许多宇航员无法完成的工作,例如进行小卫星捕获、太阳能帆板展开、交会对接等等(图5)。当然由于空间机械臂的智能化和自主化还具有局限性,有些场合需要配合宇航员进行,此时机械臂的作用就是辅助宇航员到达指定目标位置,实现机械臂和宇航员的交互作业。